Dr. Mercedes García Salguero
Former member

I am Mercedes García Salguero, PhD Student associated with the Machine Perception and Intelligent Robotics group (MAPIR), department of Systems Engineering and Automation (ISA), at the University of Málaga (Spain).
E-mail: mercedesgarsal [at] uma.es
Main research interests:
Computer vision; global optimization
Address: Dpto. Ingenieria de Sistemas y Automatica, E.T.S.I. Informatica – Telecomunicacion, Universidad de Malaga, Campus Universitario de Teatinos, 29071 Malaga, Spain



Contents
Short bio
I was born in Burgos, Spain. I received the B.Sc in “Grado en Ingeniería Electrónica, Robótica y Mecatrónica” (Degree in Electronics, Robotics and Mechatronics) from the University of Málaga in 2018 and the M.Sc in “Mecatrónica” (Mechatronics) in 2019. I am currently pursuing my PhD in “Mecatrónica” under the supervision of Prof. Javier Gonzalez-Jimenez
Topics
Here you can find a list of the topics covered during my thesis and the links to the published articles and available code.
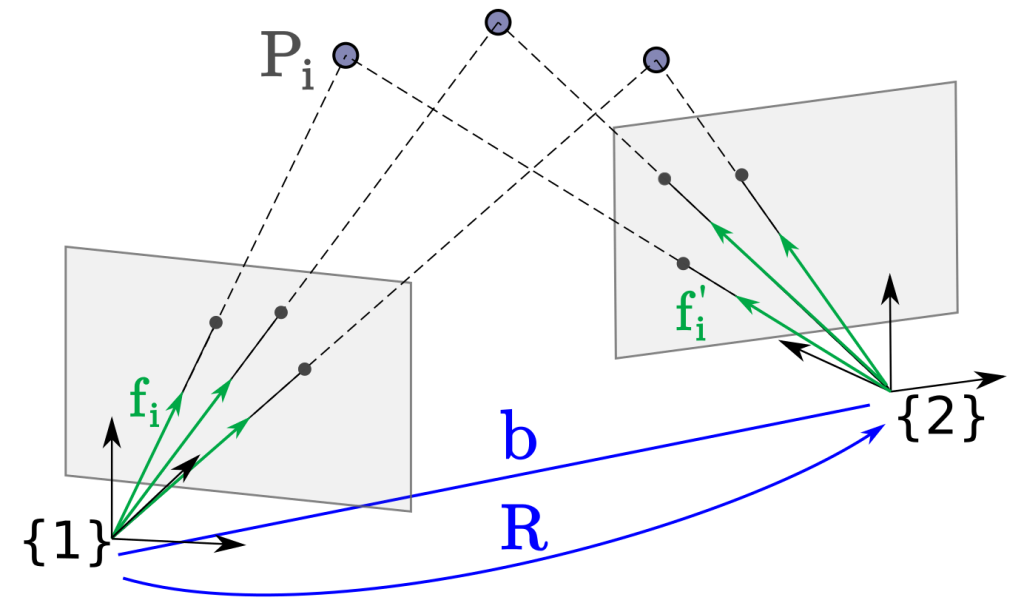
Relative Pose Problem between calibrated cameras
See contributions
- Certifiable relative pose estimation
We provide an efficient optimality certifier for this problem. Paper. Code - Fast and Robust Certifiable Estimation of the Relative Pose Between Two Calibrated Cameras
We contribute a fast and efficient certifiable solver and integrate a robust paradigm to detect and discard outliers. Paper. Code - A Sufficient Condition of Optimality for the Relative Pose Problem between Cameras
We provide a sufficient optimality condition that assures the given solution is optimal without computing the full certifier. Paper. Code - A Tighter Relaxation for the Relative Pose Problem Between Cameras
We contribute a set of convex relaxations that estimate the solution even for highly noisy data in less than 7 milliseconds Paper. Code
Relative pose problem with known information
See contributions
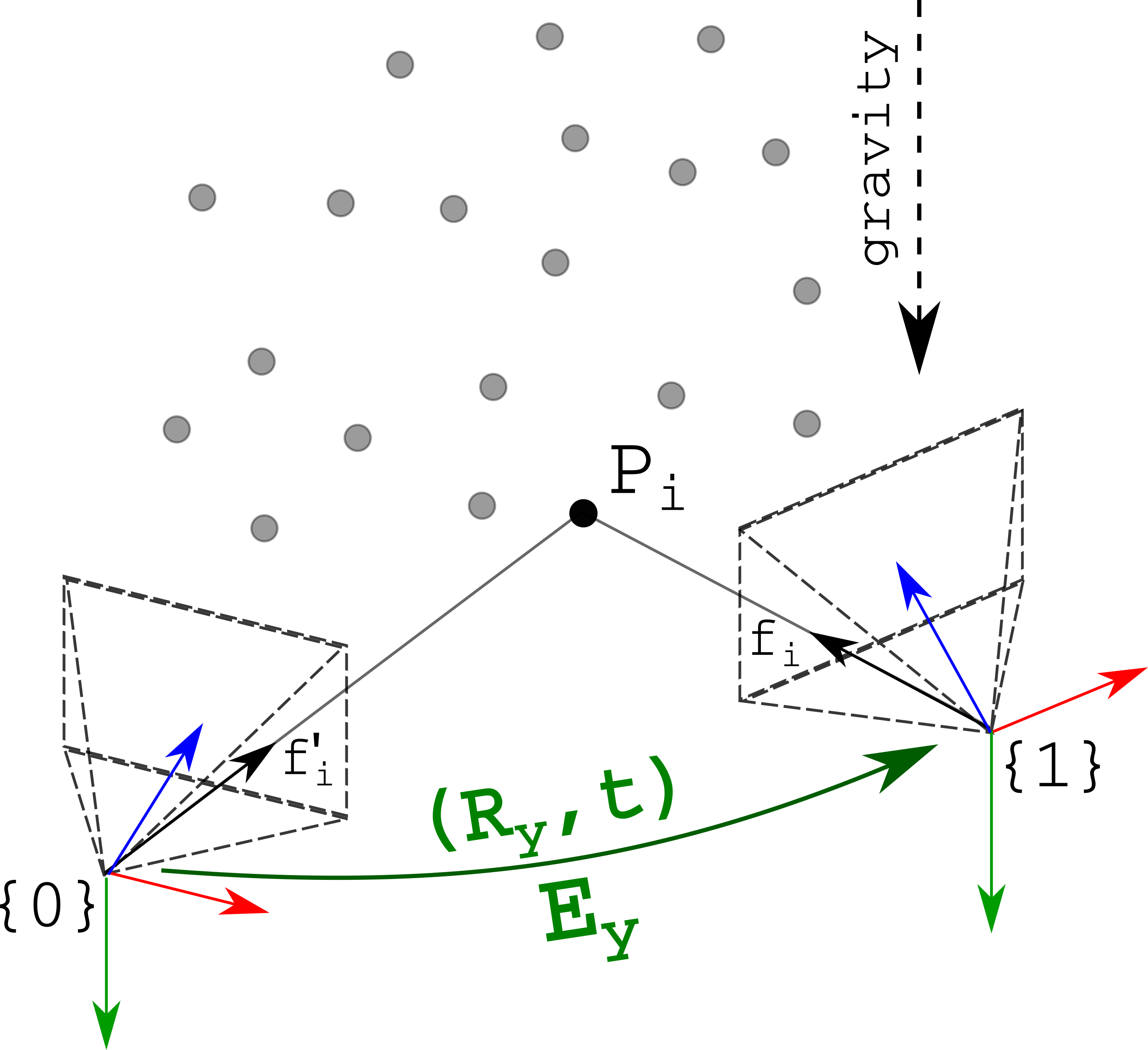
- Fast certifiable relative pose estimation with gravity prior
We provide an efficient optimality certifier for this problem under four different formulations.
Code Generic certifier Paper
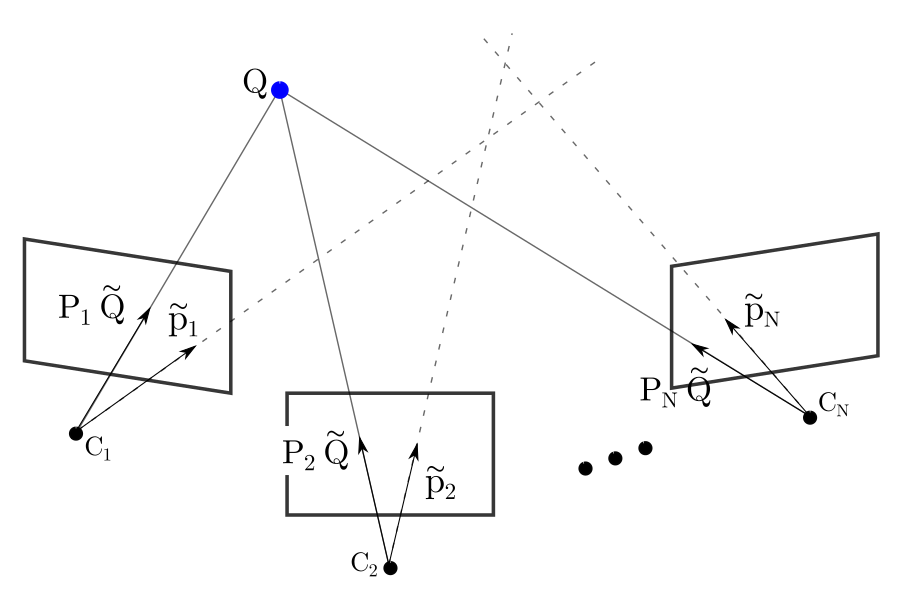
Triangulation
Publications
Here you can find a list of my publications: