Skip to content
Home
People
News
Topics
Expand
Autonomous Robots
Computer Vision
Cognitive Robotics
Artificial Olfaction
Projects
Publications
Works
Toggle Menu
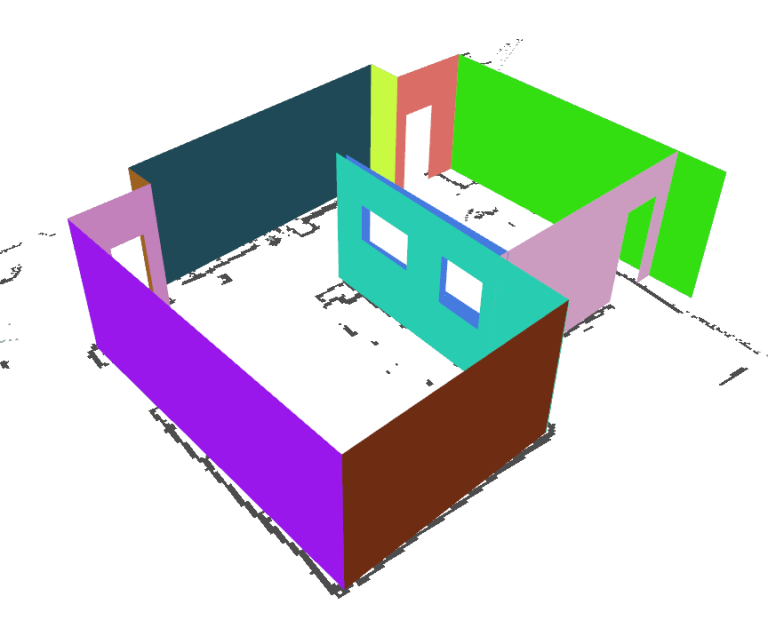
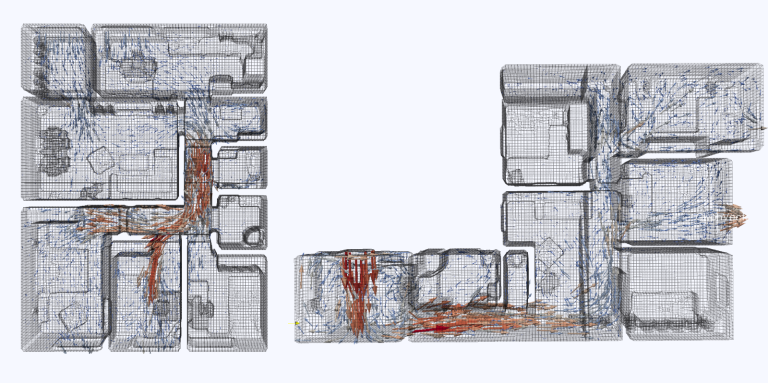
Sigma-FP: 3D Floor Plan Reconstruction
VGR Olfaction Dataset
Openmora
Robot@Home dataset
UMA Visual-Inertial Dataset
The MRPT Project
The BABEL Development System
Labeling datasets with OLT
Page navigation
1
2
Next
Scroll to top
Home
People
News
Topics
Expand child menu
Expand
Autonomous Robots
Computer Vision
Cognitive Robotics
Artificial Olfaction
Projects
Publications
Works