Computer Vision
Our group carries out applied research in computer vision focused on mobile robotics and automated recognition. We work on developing new strategies in the domain of monocular and stereo vision, RGB-D vision, laser and TOF perception, motion recovery, 3D map reconstruction, Simultaneous Localization and Mapping (SLAM) and image registration.
- Deep Learning for Computer Vision
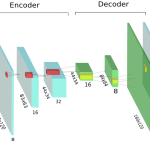 Deep learning has become the state of the art in many computer vision tasks, such as place recognition, localization, image segmentation and classification, etc.
Deep learning has become the state of the art in many computer vision tasks, such as place recognition, localization, image segmentation and classification, etc. - Global Optimization in Vision
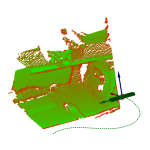
 Towards a solution for the high-dimensional, non-linear problem posed by modern SLAM approaches.
Towards a solution for the high-dimensional, non-linear problem posed by modern SLAM approaches. - Extrinsic Sensor Calibration
 Extrinsic sensor calibration is the estimation of the relative transformation between different sensors. This is a key step for sensor fusion.
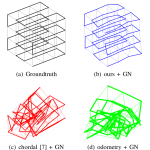
Extrinsic sensor calibration is the estimation of the relative transformation between different sensors. This is a key step for sensor fusion. - Visual Odometry
 Visual odometry (VO), also known as egomotion, is the process of estimating the trajectory of a camera within a rigid environment by analyzing a sequence of images.
Visual odometry (VO), also known as egomotion, is the process of estimating the trajectory of a camera within a rigid environment by analyzing a sequence of images. - Scene Flow
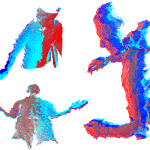 Scene flow is the semi-dense or dense 3D motion field of a scene that moves completely of partially with respect to a camera.
Scene flow is the semi-dense or dense 3D motion field of a scene that moves completely of partially with respect to a camera.