Cognitive Robotics
We do research in the frontier of AI and robotics to analyze the role and advantages of integrating cognitive processes such as decision making, knowledge inference, abstraction, etc., in real robots at all levels of their architectures.
- Knowledge Inference
 Since 2007 we have implemented different processes for inferring knowledge in real robots. The two main lines of research in this topic are semantic maps and sensor recovery. In the former, we have included semantic information into robotic operations such as task planning and navigation in order to perform more efficiently (by reducing computational cost…
Since 2007 we have implemented different processes for inferring knowledge in real robots. The two main lines of research in this topic are semantic maps and sensor recovery. In the former, we have included semantic information into robotic operations such as task planning and navigation in order to perform more efficiently (by reducing computational cost… - Decision Making
 In 2005 we started to work on the application of Reinforcement Learning to real robots. About a decade later we extended that research to the decision making process in general (not necessarily involving learning). All in all, we have studied RL in diverse contexts within robotics: robot task planning, onboard computer efficiency, robot reflex learning,…
In 2005 we started to work on the application of Reinforcement Learning to real robots. About a decade later we extended that research to the decision making process in general (not necessarily involving learning). All in all, we have studied RL in diverse contexts within robotics: robot task planning, onboard computer efficiency, robot reflex learning,… - Task Planning
 Since the early 2000s we have addressed task planning for mobile robots using different cognitive processes, such as abstraction or semantics. The results have demonstrated improved computational cost and robustness.
Since the early 2000s we have addressed task planning for mobile robots using different cognitive processes, such as abstraction or semantics. The results have demonstrated improved computational cost and robustness. - Abstraction and Multiple Abstraction
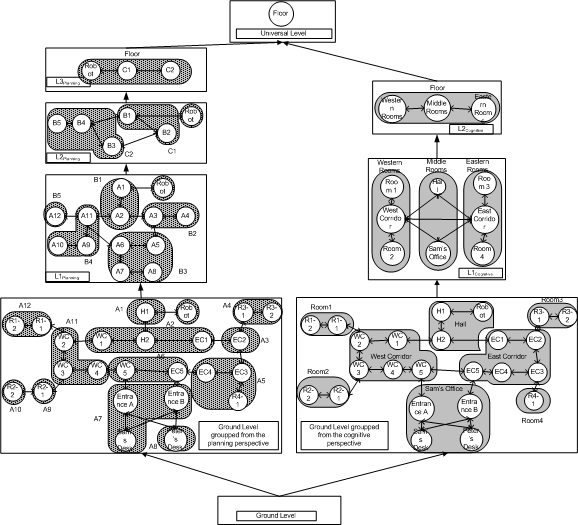 We are working since 1997 on implementing abstraction into a number of diverse robotics tasks, such as world modelling, task planning, SLAM or sensor inference. We have proven in all these contexts how this cognitive process turns exponential complexity into polinomial one in suitable situations. We have also developed the first theoretical model of multiple…
We are working since 1997 on implementing abstraction into a number of diverse robotics tasks, such as world modelling, task planning, SLAM or sensor inference. We have proven in all these contexts how this cognitive process turns exponential complexity into polinomial one in suitable situations. We have also developed the first theoretical model of multiple…