Labeling datasets with OLT
The Object Labeling Toolkit (OLT) consists of a number of software applications for performing an effortless labeling of datasets, concretely those containing sequences of RGB-D observations.
If you use this software, please cite it through:
@INPROCEEDINGS{Ruiz-Sarmiento-ECMR-2015,
author = {Ruiz-Sarmiento, J. R. and Galindo, Cipriano and Gonz{\'{a}}lez-Jim{\'{e}}nez, Javier},
title = {OLT: A Toolkit for Object Labeling Applied to Robotic RGB-D Datasets},
booktitle = {European Conference on Mobile Robots},
year = {2015},
location = {Lincoln, UK}
}
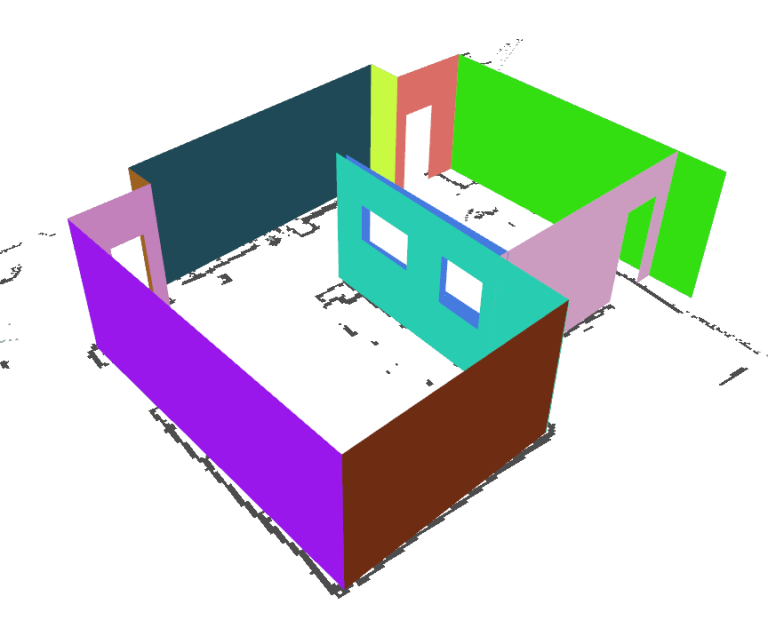
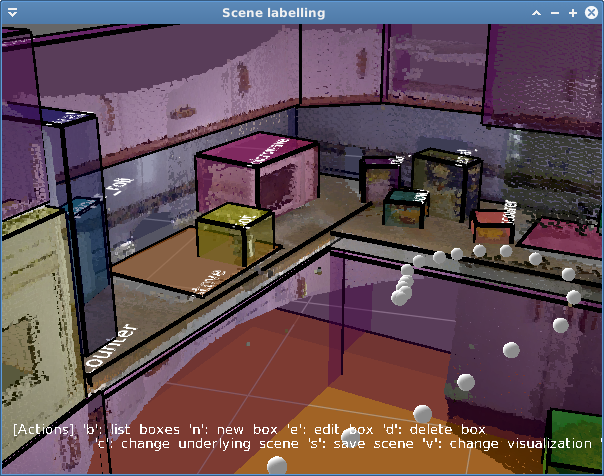
For getting the toolkit and further information please check the project webpage at GitHub. OLT aims at facilitate the labeling of arbitrarily large sequences of RGB-D observations. For that, the point clouds from the RGB-D observations are registered in order to reconstruct the captured scene. Then, the toolkit provides an application to easily annotate objects within that reconstruction by fitting boxes to them:
These annotations are finally propagated to each individual RGB-D observation in the sequence, resulting in a dense labeling of their RGB and depth information.
The main software components (appliations) of the toolkit are:
- Process_rawlog: Sets the extrinsic and intrinsic parameters of the sensors used within the dataset.
- Localization: Localizes the poses/locations from which the RGB-D observations of the datset were taken.
- Sequential_visualization: Visually shows a 3D reconstruction of the collected data, and stores it as a scene.
- Label_scene: Permits us to effortlessly label a reconstructed scene.
- Label_rawlog: Propagates the annotated labels in a scene to each RGB-D observation (to both their RGB and depth information) within the dataset.
- Dataset_statistics: Shows information of the dataset, e.g. a summary of the objects appearing on it, number of times that they appear, number of pixels they occupy, etc.
- Create_video & Segmentation: Experimental applications under development.
The toolkit resorts to two widely used libraries in robotics:
- The Mobile Robot Programming Toolkit (MRPT). Employed functionalities:
- The Rawlog common robotics dataset format.
- ICP, both 2D and 3D algorithms.
- Visualization tools.
- The Point Cloud Library (PCL). Resorted functionalities:
- GICP.
- Smoothing algorithms.