Construction of Metric-Topological Visual Maps in Mobile Robotics
Map building is undoubtedly one of the pillars for mobile robot autonomous operation. In practice, since the world is not completely known and/or is dynamic, the mapping process is inevitable coupled to robot localization, and as a result, both problems must be addressed jointly (the SLAM problem). In this project we aim at the construction of maps of large space from visual observations taken by a mobile robot equipped with a stereo rig and also with an omnidirectional camera.
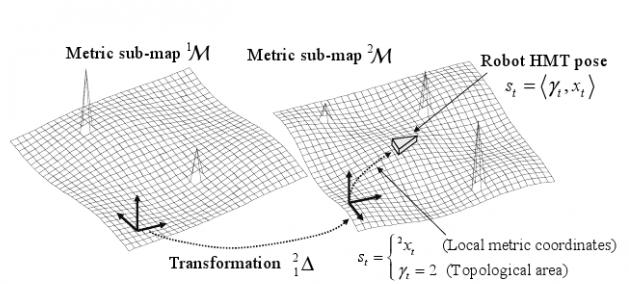
We propose an environmental representation that combines both metric and topological spatial information in a hybrid structure that we call Metric-Topological Visual Map (MTV-Map). A MTV-Map is intended to be a graph-based spatial model, in which a node is a metric sub-map consisting of a discontinuous piecewise-planar approximation of the surfaces of a certain local area. We will work on several tasks that arise within this problem, among others: 1) the design of a probabilistic technique for partitioning the visual map into areas, in a way that: keeps map consistency, is suitable for effective loop-closure detection and overcomes scalability problems; 2) creation of submaps from the triangulation of the 3D landmarks provided by the vision system, 3) the achievement of a reasonable efficient implementation of the map building process; and 4) combination of visual and laser data within the surface triangular approximation process.
REFERENCE: DPI2008-03527
TITLE: CONSTRUCTION OF METRIC-TOPOLOGICAL VISUAL MAPS IN MOBILE ROBOTICS
PRINCIPAL RESEARCHER:JAVIER GONZÁLEZ-JIMÉNEZ
INSTITUTION: UNIVERSITY OF MÁLAGA
FUNDER: SCIENCE AND TECHNOLOGY SPANISH COMMISSION
DEPARTMENT: SYSTEM ENGINEERING AND AUTOMATION
Publications
Publications in the scope of this project: