Development of a Mobile Robot with Olfactory Capability(Jan’09–Mar’14)
Regional Project
Regional Project
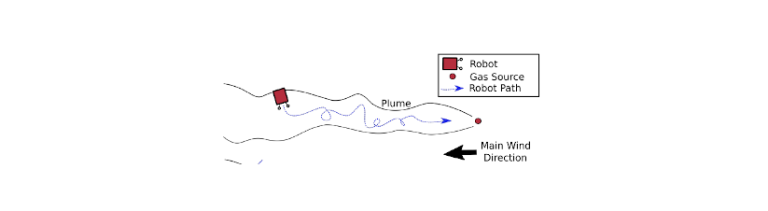
This project addresses the problem of providing a mobile robot with olfaction capability to recognize and estimate odor concentrations in the environment. This information, combined with that provided by other sensors (cameras, laser scanner, etc..) will be used in robot navigation and operation tasks in applications such as monitoring and controlling of abnormal levels of gas contaminants, gas leak detection, searching gas emission sources, studying distribution of gaseous substances, etc.
To this aim, we investigate aspects such as the creation of gas concentration maps, strategies to explore the environment based on detected odors, as well as the design and implementation of a specific control architecture which integrates olfactory information. This project is being carried out in collaboration with the Center for Applied Autonomous Sensor Systems at the Orebro’s University (Sweden).
REFERENCE: 2008-TEP-4016
TITLE: MOBILE ROBOT OLFACTION
PRINCIPAL RESEARCHER:JAVIER GONZÁLEZ-JIMÉNEZ
INSTITUTION: UNIVERSITY OF MÁLAGA
FUNDER: ANDALUCÍA REGIONAL GOVERNMENT
PERIOD: January 2009 – March 2014 (Project has finished)
DEPARTMENT: SYSTEM ENGINEERING AND AUTOMATION
Publications
Publications in the scope of this project: