Paper accepted at ICRA 2024 (Jan’24)
We are glad to inform that the article regarding odometry applied to Doppler-capable sensors has been accepted for presentation at the renowned International Conference on Robotics and Automation (ICRA), being held on May 2024 in Yokohama, Japan.
This work is the result of the collaboration between our group and the AASS Mobile Robotics and Olfaction (MRO) group, from the University of Örebro. It started while Andrés Galeote was doing his research stay there, and concluded with this notable contribution.
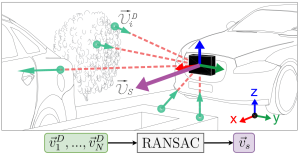
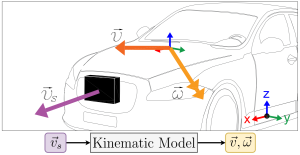
The paper describes a novel odometry estimation method for mobile platforms that employs the information captured by a Doppler-capable 3D range sensor. Exploiting the perceived velocities of objects located in the scene, the proposed approach estimates with precision the 3D motion of the vehicle by taking into account its kinematic model.
One of the main novelties of the presented approach is removing the need to perform data association as in traditional odometry methods, as the movement can be recovered efficiently from a single scan. Experiments show how its short-term accuracy and efficiency, make this novel method a suitable candidate to provide a motion prior to more complex and accurate localization algorithms, helping them converge to the right solution.