Odor Classification
Odor recognition deals with the problem of identifying which of a set of odor categories a new volatile sample belongs to.
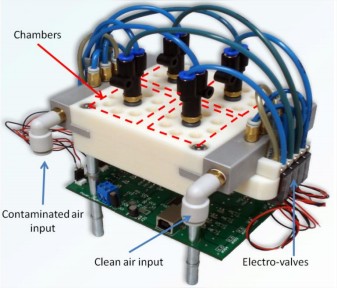
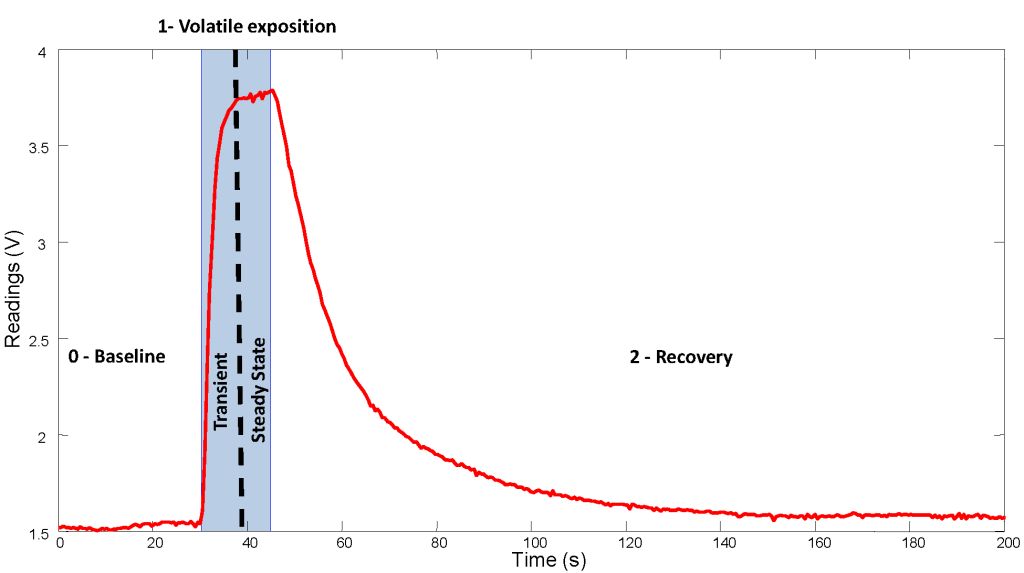
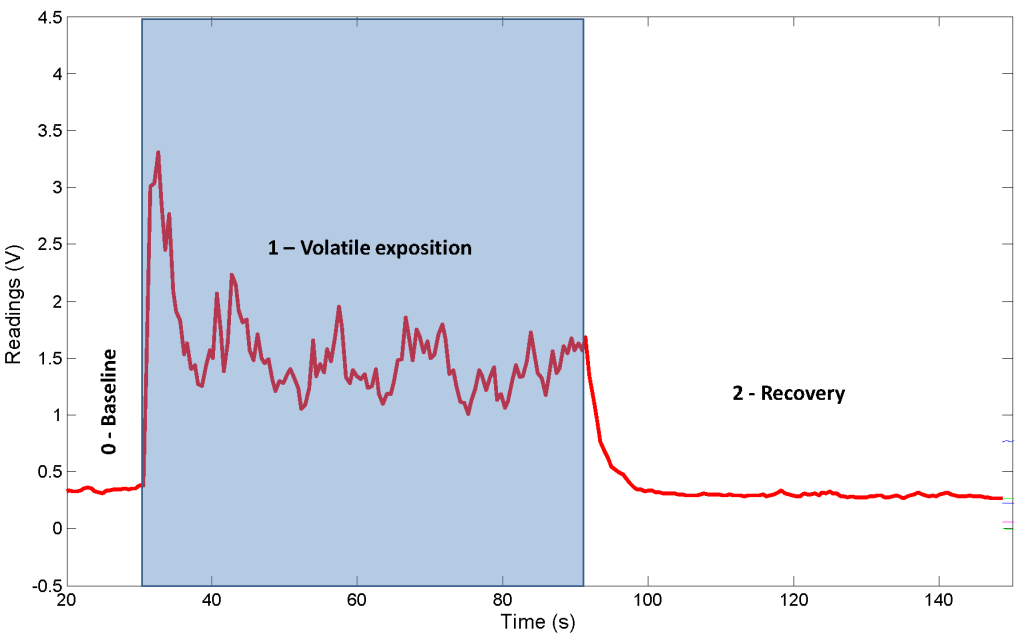
It plays an important role in the development of many applications, such as quality control in food processing chains, detection, and diagnosis in medicine, finding drugs and explosives, or the more common estimation of blood alcohol content (BAC) for drivers. Artificially, this can be achieved by using an array of gas sensors and a pattern recognition algorithm, that is, an electronic nose (e-nose). Usually, the smelling process with an e-nose (aimed to gather the olfaction data to be processed by the pattern recognition algorithm) is carried out in three phases: first, the sensor array is exposed to a reference gas (baseline), then to the analyte, and finally the analyte is flushed from the system allowing the sensors to recover.
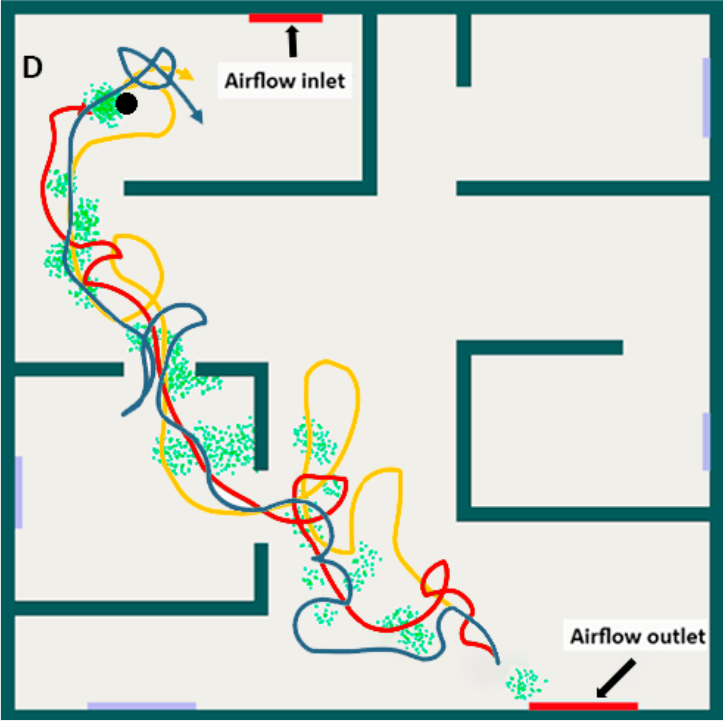
Although this technique has shown to be successful for a subset of applications where the sampling conditions are well controlled, there are others, like pollution monitoring or leak detection, that require measuring the environment continuously and at different locations. For such scenarios, the use of a mobile robot with the capability of identifying and measuring the volatile concentration is of great help.
In such cases, the signals obtained by the array of gas sensors present a completely different structure, being characteristic that the steady state of the sensors is rarely reached, and consequently the analysis has to be done on the transient phase of the signals.
We are actively working on the development of new approaches to improve the identification performance of gases with mobile robots. This includes the identification of odors under uncontrolled environmental conditions, with short data sequences, or when multiple volatiles are present simultaneously.
Data-Sets
Available datasets aimed at the classification of odors with mobile robots include:
- Dataset for Mobile Robotics Olfaction: A collection of 3 datasets corresponding to 3 different scenarios:
- Controlled gas pulses.
- Classification with different gas sensors (MCE-nose).
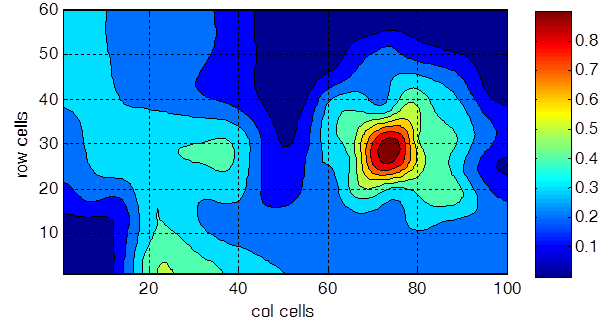
- Classification in turbulent environments.
This dataset is composed of more than 120 data logs, and it includes a detailed description of the experimental setup for each of the three presented scenarios. This dataset can be downloaded here.