Gas Source Localization
Gas source localization with mobile robots is a critical area of research aimed at enhancing the robots’ ability to detect and pinpoint the origins of gas emissions in various environments. By leveraging advanced sensor technology and sophisticated algorithms, mobile robots can navigate through complex terrains and identify the exact locations of gas leaks or hazardous substance emissions. This capability is especially valuable in industrial settings, where timely identification and mitigation of gas leaks are crucial for ensuring safety and preventing environmental contamination. The mobile robots’ mobility and autonomous navigation allow them to access hard-to-reach areas, making them indispensable tools for comprehensive gas monitoring.
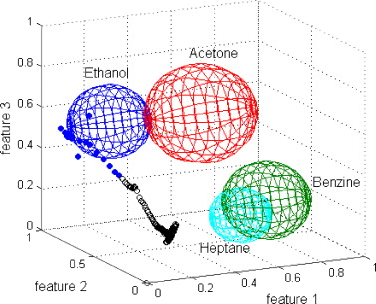
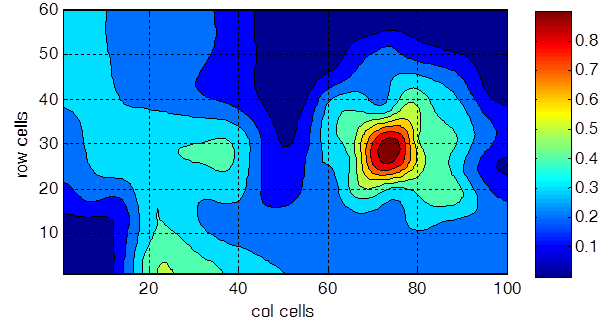
The process of gas source localization involves several steps. Initially, the robots detect the presence of a gas and begin to move towards higher-concentration areas. Using algorithms such as particle filters, Bayesian inference, or probabilistic approaches based on dispersion models, the robots continuously refine their path based on real-time sensor data. This iterative approach enables the robots to hone in on the gas source with increasing accuracy. The integration of machine learning techniques further enhances the robots’ ability to differentiate between multiple gas sources and environmental noise, providing precise localization even in complex and dynamic settings. This technology not only improves safety and operational efficiency in industrial and public safety applications but also holds promise for environmental monitoring and disaster response, where rapid and accurate detection of hazardous gases is essential.