Global Optimization in Vision
Towards a solution for the high-dimensional, non-linear problem posed by modern SLAM approaches.
State-of-the-art approaches for SLAM take a graph-based approach that seeks the best model from the consensus of many available measurements from different devices. This problem becomes hard due to both the inherent non-linearities in the problem as well as the scalability issues with map size. As a result, we end up with a high-dimensional non-linear problem that is addressed through local iterative optimization techniques.
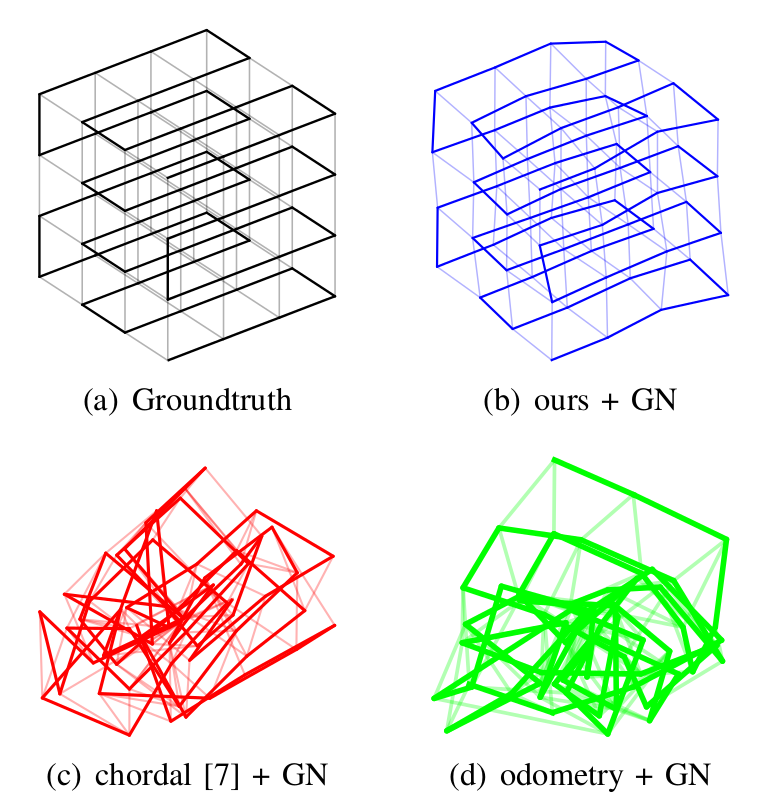
Lagrangian duality makes it possible to find the global optimal solution for PGO problems where the strong duality condition is fulfilled. When facing more challenging PGO problems this condition is not satisfied and we resort to iterative methods where the initialization is vital. In “Initialization of 3D Pose Graph Optimization using Lagrangian duality” we exploit our novel formulation for 3D PGO (in the work below) to provide an initial guess that outperforms state-of-the-art initialization approaches. If there is strong duality, our method directly delivers the global solution but at a much lower cost than existing approaches.
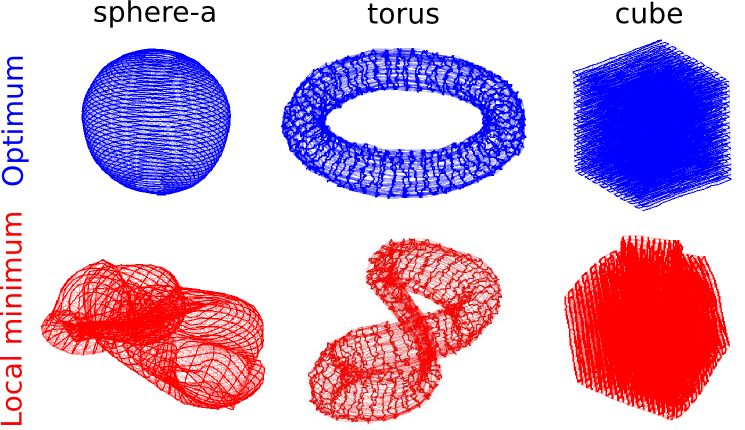
SLAM has become a fundamental tool for many modern applications. So, in real applications, we need to detect wrong solutions in order to avoid catastrophic failure. In “Fast Global Optimality Verification in 3D SLAM” we propose a novel formulation of the SLAM problem and exploit it to verify optimality much faster than the state-of-the-art method.
Publications
Please refer to the following articles for further details: