HOUNDBOT: Gas Mapping and Source Localisation with a Mobile Robot (Oct’21–Sep’23)
Regional Project
Regional Project
El proyecto se circunscribe al ámbito de la robotica olfativa, una línea emergente dentro de la robotica inteligente que persigue la integración del olfato artificial
en el sistema sensorial de un robot móvil para complementar su percepción del mundo físico y, con ello, poder mejorar y expandir sus prestaciones.
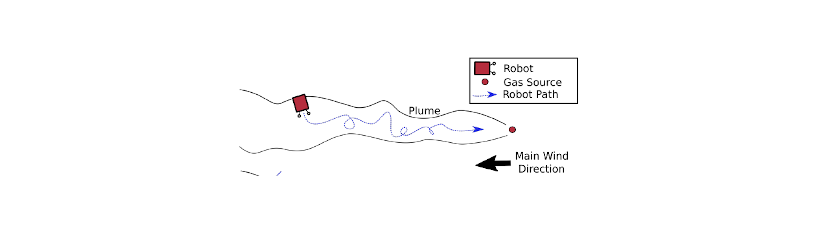
Específicamente, esta propuesta propone desarrollar nuevos métodos para que un robot móvil que opera en recintos reales, como edificios y plantas industriales, pueda construir mapas de concentración de gas y buscar la fuente desde donde emana el gas. La complejidad científico-técnica del proyecto surge de considerar escenarios realistas, con el menor número de simplificaciones posibles del problema, incluyendo: entornos con obstáculos, dispersión de gas con corrientes de convección y turbulencias, medidas de la e-nariz y anemómetro con ruido y retardos en la respuesta.
Además, se explotará toda la capacidad sensorial del robot, combinando las medidas olfativas con las de otros sensores embarcados en el, como cámaras o escáneres láser.
La investigación propuesta encuentra una utilidad clara en misiones de monitorización e inspección de emanaciones de gas por un robot, abarcando aplicaciones como detección de fugas de sustancias volátiles, el control de los niveles de concentración de gases tóxicos, la detección de explosivos, drogas o sustancias químicas en lugares públicos (aeropuertos, estaciones de ferrocarril,. . . ), entre otras.
REFERENCE: P20_01302
FUNDED BY: Junta de Andalucía
PERIOD: Octubre 2021 – Septiembre 2023
PRINCIPAL RESEARCHER: JAVIER GONZÁLEZ-JIMÉNEZ
INSTITUTION: University of Málaga
Publications in the scope of this project: