IRO: Improvement of the sensorial and autonomous capability of Robots through Olfaction(Jan’14–Feb’19)
Regional Project
Regional Project
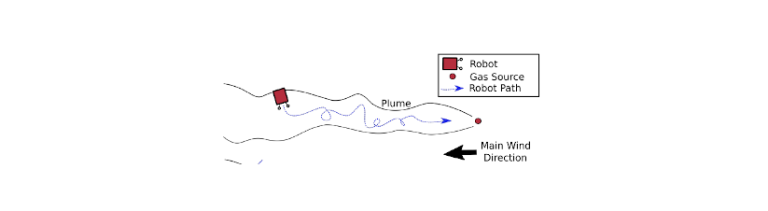
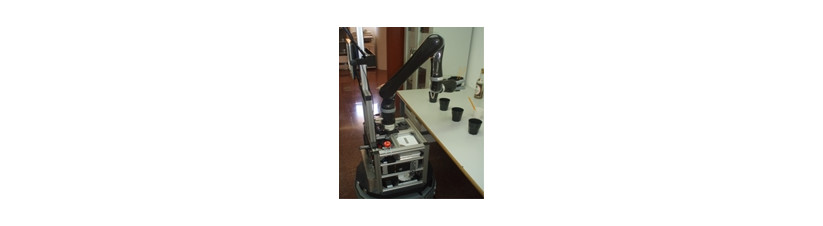
Olfaction is a valuable source of information about the environment that has not been sufficiently exploited in mobile robotics yet. We claim that data provided by e-noses may have an important added-value when combined with other sensing modalities (particularly, vision), and also when olfaction is integrated into the robot high-level processes. This project aims at advancing into this direction by investigating mechanisms to use odor information (both the type of volatile and its concentration) in problems such as object recognition and scene-activity understanding. In this research we will pay special attention to the role of semantics within the robot perception and decisión-making processes. Through this approach we expect to improve the robot capabilities in terms of effciency, autonomy and usefulness
REFERENCE: 2012-TEP-530
PRINCIPAL RESEARCHER: JAVIER GONZÁLEZ-JIMÉNEZ
INSTITUTION: UNIVERSITY OF MÁLAGA
FUNDED BY: ANDALUCÍA REGIONAL GOVERNMENT
PERIOD: January 2014 – February 2019
Media
Newspaper: Trabajan en mapas de olores de Málaga para mejorar su calidad ambiental (in Spanish)
(Fuente: Diario SUR – Cónica Universitaria, 27 Enero 2015)
Un grupo de investigadores de la Escuela Superior de Telecomunicación de Málaga están desarrollado mapas de olores con la ayuda de una ‘nariz electrónica’, que percibe olores a través de ocho sensores y que mediante algoritmos, procesa la información a tiempo real. La investigación tiene, según el responsable del proyecto Javier González, profesor del departamento de Ingenería de Sistemas y Automática, múltiples ventajas ambientales: Disponer de mapas de olores continuamente actualizados ayudaría a detectar qué zonas de la ciudad concentran mayor polución o se podría mejorar el proceso de recogida de basura.
Publications
Publications in the scope of this project: