Skip to content
Home
People
News
Topics
Expand
Autonomous Robots
Computer Vision
Cognitive Robotics
Artificial Olfaction
Projects
Publications
Works
Toggle Menu
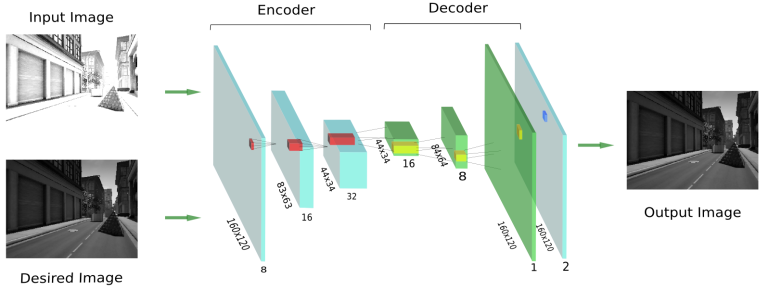
Deep Learning for Computer Vision
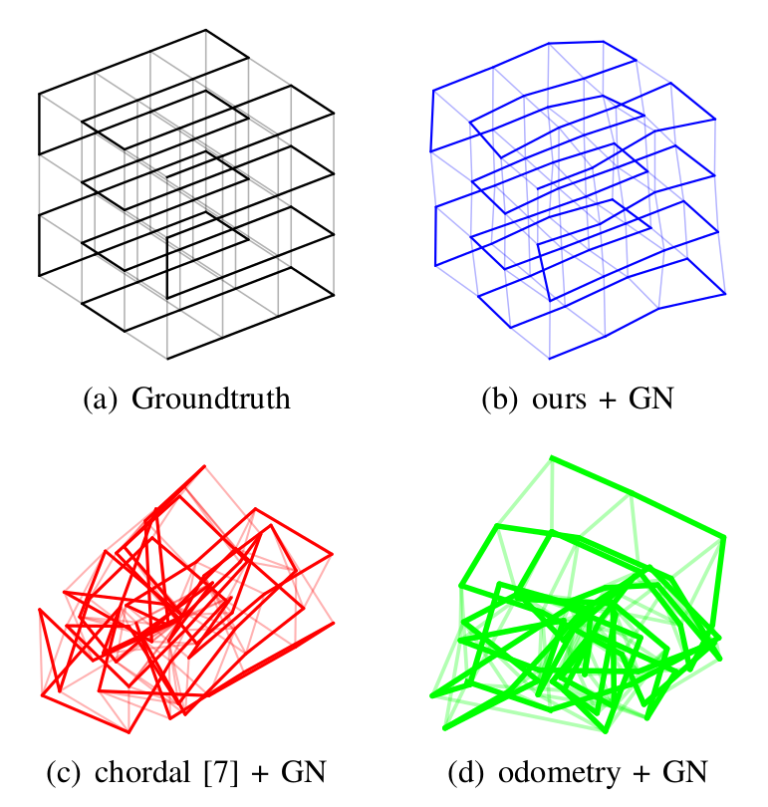
Global Optimization in Vision
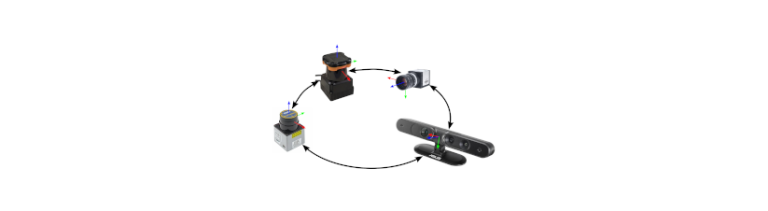
Extrinsic Sensor Calibration
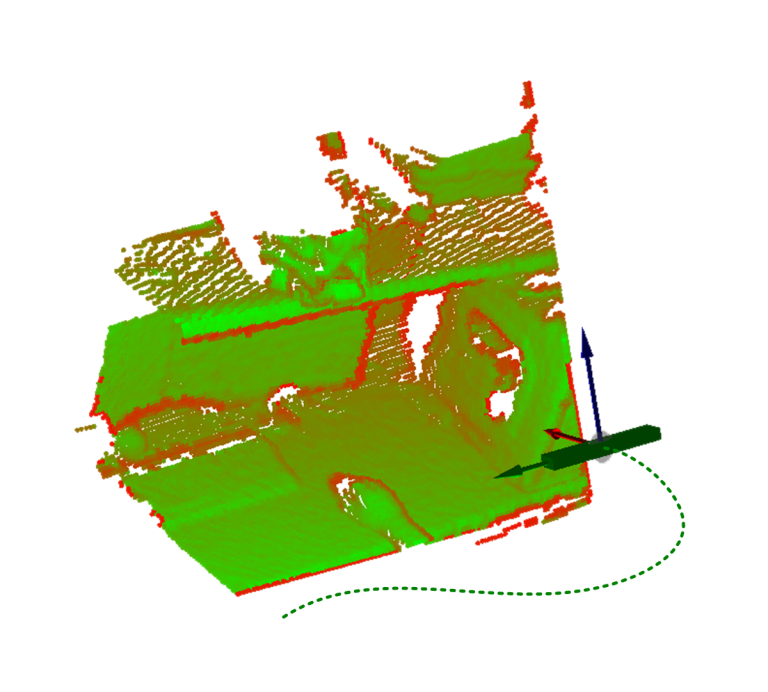
Visual Odometry
Scene Flow
Scroll to top
Home
People
News
Topics
Expand child menu
Expand
Autonomous Robots
Computer Vision
Cognitive Robotics
Artificial Olfaction
Projects
Publications
Works