Task Planning
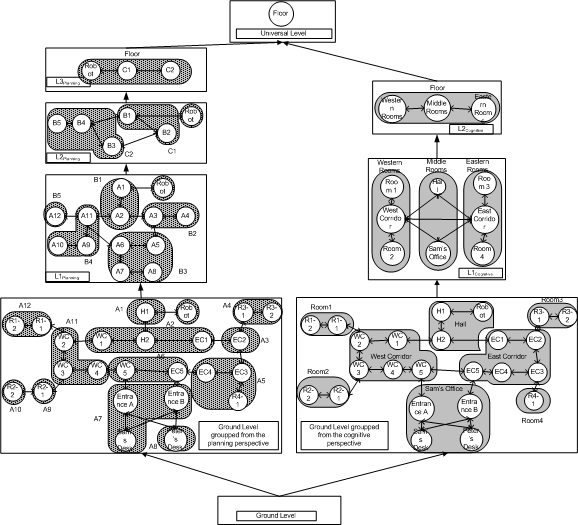
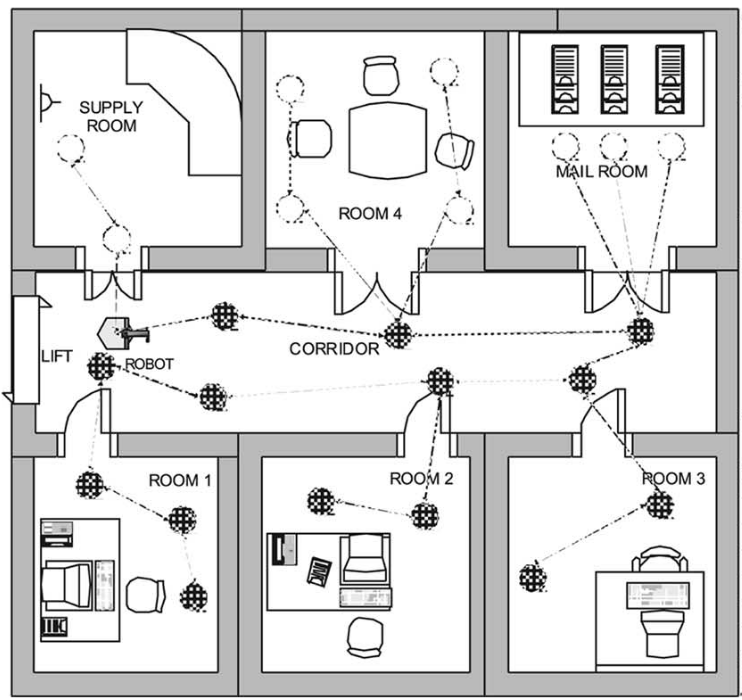
Since the early 2000s we have addressed task planning for mobile robots using different cognitive processes, such as abstraction or semantics. The results have demonstrated improved computational cost and robustness.
We have reported the following results concerning task planning in robotics: