Knowledge Inference
Since 2007 we have implemented different processes for inferring knowledge in real robots. The two main lines of research in this topic are semantic maps and sensor recovery. In the former, we have included semantic information into robotic operations such as task planning and navigation in order to perform more efficiently (by reducing computational cost through the guidance of semantics) and more robustly (by inferring knowledge from semantics that complements the current knowledge of the robot to carry out its operations). In the latter, we have used Bayesian inference to detect anomalies of robot sensors and recover (infer) their correct behaviour.
Semantic Maps
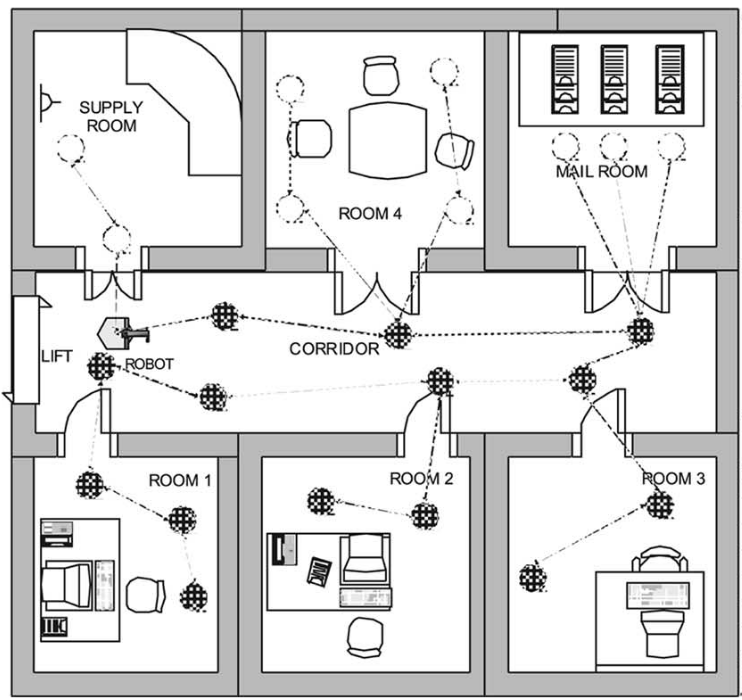
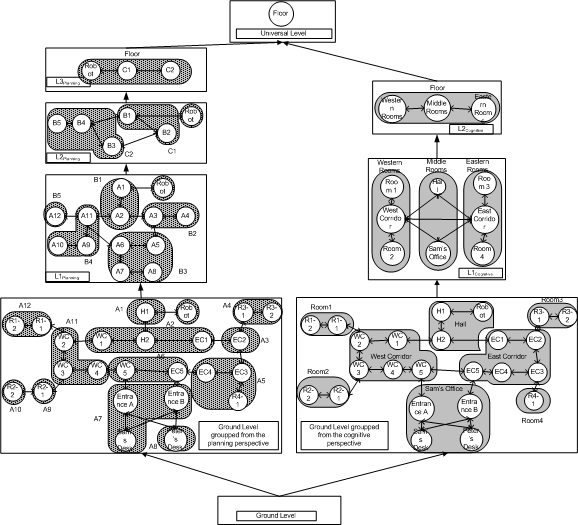
In 2005 we started our first line of work on knowledge inference in robotics: the use of semantic information (in the form of semantic maps) for improving some robotic tasks and also to infer knowledge that the robot can use to perform better:
Anomaly Detection and Recovery in Robot Sensors
In 2016 we started another line of work on knowledge inference for real robots, and, in particular, in applying this process (in the its form of probabilistic deductions through Bayesian networks) to low-level robotic processes such as anomaly detection and recovery in robotic sensors: